




















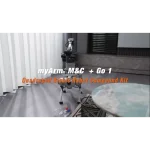






myArm M&C Teleoperation Robotic Arms for Quadruped Robot Dog
The myArm M&C Teleoperation Robotic Arm for Quadruped Robot Dog is an advanced, research‑grade robotics platform that merges the agile mobility of a quadruped robot with the high‑precision manipulation of the myArm robotic arm series. Designed for exploration, education, and multi‑environment research, this integrated system enables users to simulate and execute complex tasks across diverse terrains and experimental setups. At its core, the kit features a quadruped robot dog paired with both the myArm C650 and myArm M750 robotic arms, delivering multi‑dimensional operation capabilities ideal for robotics labs, AI research, and algorithm development. Its easy installation and connection system allows rapid setup without external controllers, making it accessible for students, educators, and developers. The platform supports Python and ROS, two of the most widely used development environments in robotics. This ensures seamless integration into machine learning workflows, motion‑control research, and autonomous navigation projects. With built‑in balancing algorithm verification and dynamics development support, the kit provides a robust foundation for testing stability, motion accuracy, and advanced control strategies. Its standardized communication protocol ensures efficient data exchange, while the included power adapters, data cables, and accessories make it a complete, ready‑to‑deploy solution. Whether used for complex terrain exploration, automated agricultural simulations, or classroom demonstrations, the myArm M&C Quadruped Bionic Robot Compound Kit stands out as a versatile, high‑performance tool for modern robotics innovation.
Original price was: 6,000.00 €.5,490.00 €Current price is: 5,490.00 €. VAT Inc.
10 In Stock.
myArm M&C Teleoperation Robotic Arm for Quadruped Robot Dog – Specifications:
- Quadruped mobility and dual robotic arm manipulation: Enables multi‑dimensional operation and task execution in complex environments.
- Easy installation & connection: No external controller required; plug‑and‑play setup.
- Multiple development environments supported: Python, ROS (Robot Operating System), myStudio firmware management platform with cloud‑based updates, ideal for AI, machine learning, motion control, and navigation research.
- Balancing algorithm verification: Supports stability testing and motion‑accuracy research.
- Dynamics development support: Suitable for advanced motion analysis and robotics algorithm development.
- Standardized communication protocol: Ensures stable and efficient data exchange between devices.
- Included Hardware Components: myArm C650 robotic arm X 1, myArm M750 robotic arm × 1, 12V 5A power adapter × 1, USB data cables × 2, DC power adapter cable × 1
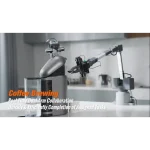
myArm C650 (motion‑information collection arm)
- Degrees of freedom: 6 DOF
- Weight: 1.8 kg
- Horizontal working radius: 650 mm
- Encoder resolution: 4096‑bit on all joints
- Data output frequency: 50 Hz
- Use case: motion tracking, data collection, algorithm development
myArm M750 (intelligent manipulation arm)
- Degrees of freedom: 6 DOF
- Reach: 750 mm
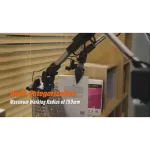
- Rated load: 500 g
- Maximum load: 1 kg
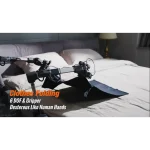
- End effector: 1‑DOF parallel gripper
- Use case: precise manipulation, complex motion control
Quadruped Robot Platform
- Universal quadruped manipulator platform designed for research and exploration.
- It supports complex terrain simulation, agricultural automation experiments, and classroom/lab teaching.
| Weight | 20 kg |
|---|---|
| Dimensions | 100 × 20 × 20 cm |
-
 Tax-free billing for european professionals if the VAT number is valid.
Tax-free billing for european professionals if the VAT number is valid.
-
Delivery within 7 -10 days for in-stock products and 3-4 weeks for out of stock products. Free delivery for orders of more than 60 euros (apart of Smart Vehicles and heavy products). Warehouses in Spain, Germany, Poland, France, Hungary and Greece.
-
We will reimburse or exchange any defective, damaged during the transport or non-conforming product. You have the right to cancel this contract within 14 days without giving any reason. The cancellation period will expire after 14 days from the day on which you acquire, or a third party other than the carrier and indicated by you acquires, physical possession of the last good. To exercise the right to cancel, you must inform us [NTS Systems & Trade LTD, Rakovski 157, 1000, Sofia, [email protected], +35 92 49 31064) of your decision to cancel this contract by a clear statement (e.g. a letter sent by post, fax or e-mail). You may use the attached model cancellation form, but it is not obligatory. To meet the cancellation deadline, it is sufficient for you to send your communication concerning your exercise of the right of cancel before the cancellation period has expired.
Related products
Alpha 1S Programmable & Artificial Intelligence Robot
Out of stock

DEALDIG Robvacuum 8 Robot Vacuum Cleaner with WiFi Connectivity for Alexa
Out of stock

Escam Intelligent Home Interactive Robot
Out of stock

Intelligent Star Wars RC BB8 Robot With Sound Action and 2.4G Remote Control
Out of stock

Multi-Function Intelligent Balance G-sensor RC robot
In stock

RC Robot Flashing & Rotating with Remote Control
Out of stock

Solar Educational Robot Toy Kit (STEM) – Spaceship
Out of stock

Xiaomi Roborock Smart Vacuum Cleaner
Out of stock
